Biomedical Engineering Reference
In-Depth Information
correspond to the rigid motion of the cluster which is not
taken into account by these correction methods. Global
optimizations simultaneously correct the trajectories of all
markers attached to the lower limb [LU 99, REI 05] or the
upper limb [CUT 06, ROU 02]. They are based on
the
a priori
modeling of the rather complex joints in the
kinematic chain by either pivots, universal joints, spherical
joints or parallel mechanisms [DI 07, FEI 03]. The joint
kinematics obtained by these methods largely depends on
this choice, i.e. kinematic constraints taken into account in
the model [AND 10, DUP 10] and correctly adjusting the
model to the subject analyzed is difficult [SCH 11].
Therefore, the clinical use of this type of method is still
controversial [STA 09].
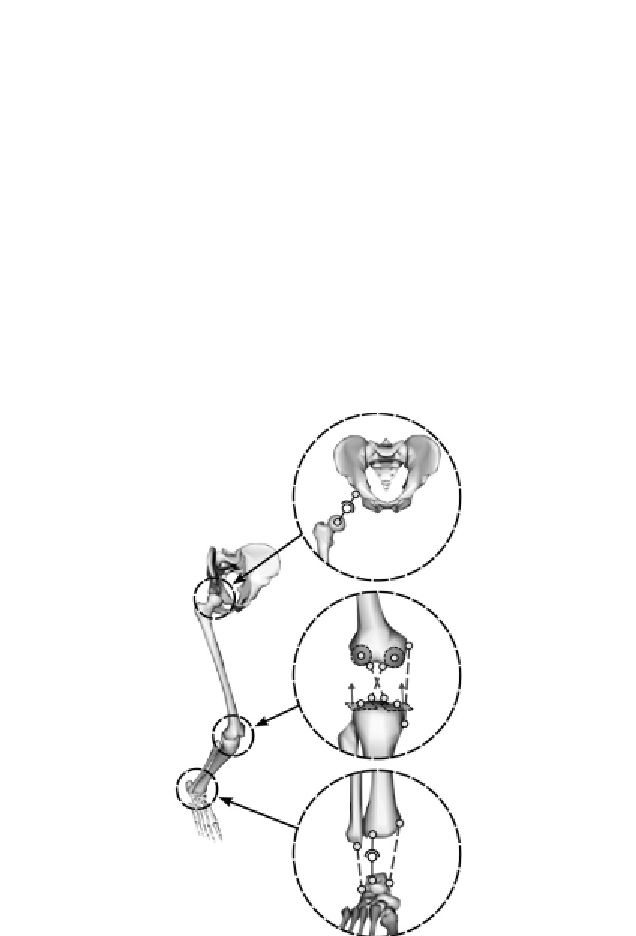
Figure 4.4.
Model of the lower limb with parallel
mechanisms used for global optimization