Biomedical Engineering Reference
In-Depth Information
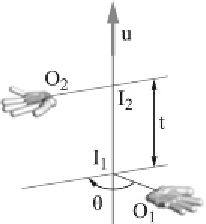
particular point in the segment rather than its translation
(component “t” of the movement along the helical axis,
a
priori
different from the displacement vector
, except
when point
O
belongs to the axis, see Figure 3.10).
Obviously, the amplitude of the “translations” defined using
this method depends on the particular point chosen whereas
the translation, in theory, has a unique value for all the
points of the segment.
In this article, the “joint translations” are defined by the
relative position of two reference points,
O
f
and
O
t
, attached
respectively onto the SCS of the femur and tibia,
characterized by vector
H
O
O
, these points assumedly
align in the neutral position of the joint. The vector
components
H
, in the non-orthonormal coordinate system of
JCS, are hence “joint translations”:
H
S
Z
+
S
X
S
Y
Figure 3.10.
Translation “t” of a solid along the helical axis
These components, illustrated in Figure 3.11, are
calculated from the mixed products of the different vectors,
according to the relations [CHE 00, SMI 64]:
S
,
,
,
,
,
,
;
S
and
S
,
,
,
,
,
,