Biomedical Engineering Reference
In-Depth Information
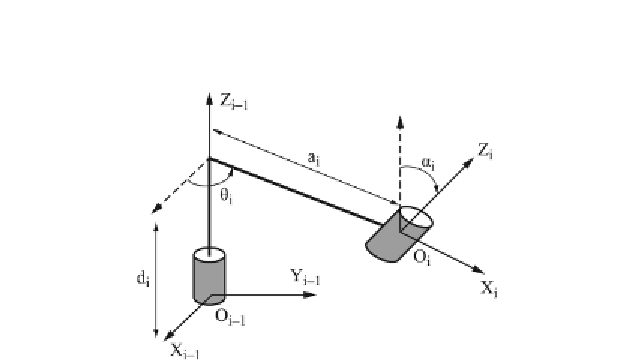
angle
i, or to consider one degree of freedom in translation
and then the articular variable is distance di.
θ
Figure 3.3.
Parameterization according to the convention of
Denavit-Hartenberg [DEN 55]
If a kinematic chain is subject to parameterization by
respecting this convention, the homogeneous matrix
describing the position and orientation of segment Si with
regard to the previous is always written in the same way,
according to four parameters (only one of which being
variable).
cos
θ
−
sin
θ
.cos
α
sin
θ
.sin
α
a
a
.cos
θ
⎡
⎤
i
i
i
i
i
i
i
⎢
⎥
sin
θ
cos
θ
.cos
α
−
cos
θ
.sin
α
.sin
θ
⎢
⎥
i
i
i
i
i
i
i
i
−
1
T
=
⎢
i
⎥
0
sin
α
cos
α
d
i
i
i
⎢
⎥
0
0
0
1
⎣
⎦
3, top left, corresponds to the
relative rotation matrix between the segments with each
column being composed of unit vector components of
coordinate system R
i
, and the four
th
column is composed of
vector components linking the origins of the successive
segments, expressed in the coordinate system of the
upstream segment (R
i-1
). The complete geometric model of
this chain, i.e. the homogeneous matrix expressing the
In this matrix, part 3
×