Biomedical Engineering Reference
In-Depth Information
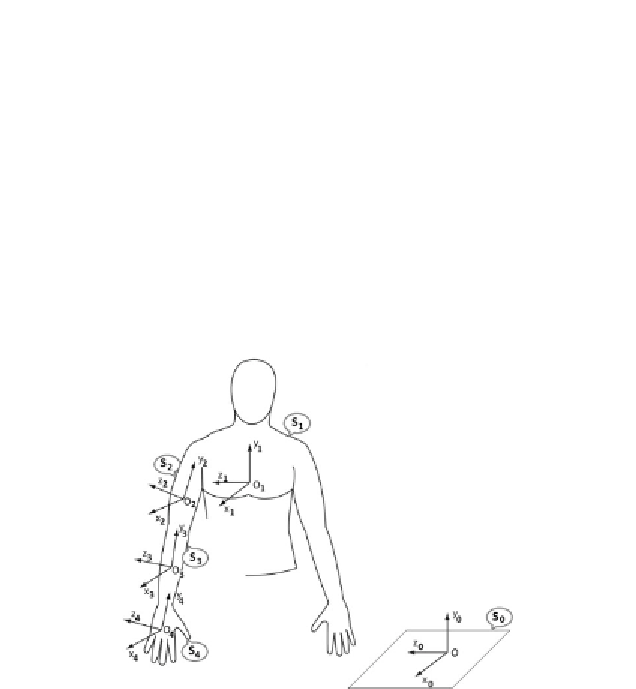
situated upstream in the kinematic chain (proximal
segment), this is called relative parameterization. Thus, if
we opt for absolute parameterization, the description of
attitude of the segment of interest S
i
will depend on all the
parameters (translations and rotations) of the kinematic
chain from the coordinate system R
0
to the coordinate system
R
i
(attached to segment S
i
) whereas if we choose relative
parameterization only the parameters characterizing
the movement of the coordinate system R
i
relative to the
coordinate system R
i-1
will be included, i.e. those of the joint
between both rigid bodies or joint parameters.
Figure 3.1.
Coordinate systems representing the
rigid bodies of a kinematic chain
The most widely used parameterization in motion
analysis is relative parameterization, which will be described
in the remainder of this chapter. Nevertheless, the
generalized coordinates approach involves expressing the
position and orientation of each rigid body by six parameters
and convert the joints between them into constraint
equations and is very systematic [HAU 89, NIK 91]. In
particular, this approach is preferred when the system has