Biomedical Engineering Reference
In-Depth Information
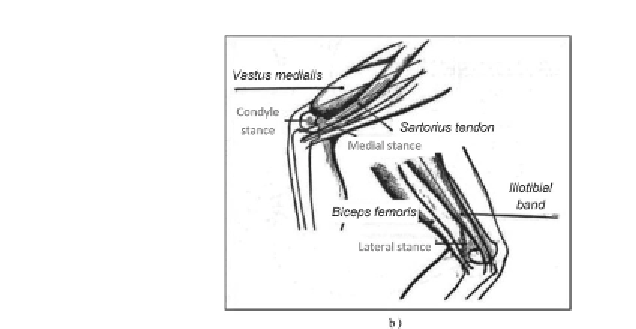
Figure 5.10.
a) Devices attached to the femur and tibia.
b) Positioning of the harness, with the optimal location of
the three points of support on the femur specified (modified
according to the user manual for the system KneeKG™)
Each device is equipped with three reflective makers,
helping to reconstruct their position in space using the system
Optotrak™. Calibration is then performed, during which the
operator locates (using a pointer equipped with reflective
markers) the medial and lateral condyles as well as the
medial and lateral malleoli of the lower limb analyzed.
The subject equipped with these devices and the position of
the pointer are simultaneously recorded in the system's
measurement space, and it is thus possible to express the
coordinates of all the points in the same reference coordinate
system. The center of the malleoli defines the center of the
ankle joint, origin of the anatomical coordinate system
associated with the tibia. To define the center of the hip joint,
the origin of the anatomical coordinate system associated with
the femur, the subject performs circumduction of the hip. By
recording the relative movement of the pelvis and the femur
devices during this circumduction, the center of the hip is
calculated using a pivot point algorithm [SIS 06]. To define
the center of the knee joint, the subject actively executes
flexion/extension of the knee, without exceeding 60° flexion,