Image Processing Reference
In-Depth Information
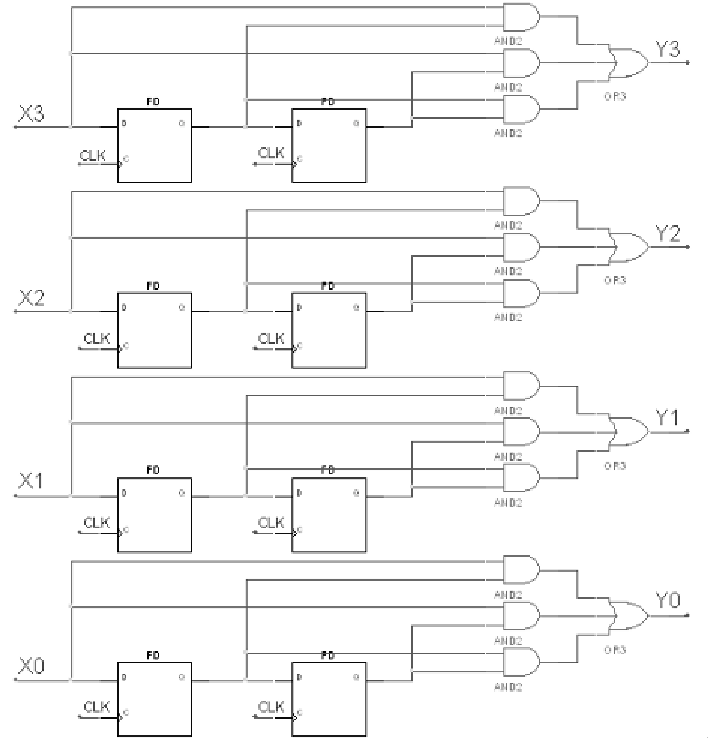
Figure 8.7
Three-point running median filter implemented via a stack filter.
lies in the top half of the dynamic range of the output, i.e.,
L
/2
k
L
-1.Otherwise
it lies in the bottom half, so 0
k
L
/2. Next the value in the middle of the top half
y
3
L
/4
is computed and the process continues until the precise value of
k
is located.
An elegant way of implementing this strategy is using a
bit-serial approach
.
The gray level value of the output signal
y
is determined one bit at a time starting
with the most significant bit. The value of each bit indicates if the output lies in the
top or bottom half of the range.
A further observation that can result in a drastic reduction in computation time
is that the grayscale output
y
must always be the same as one of the time-delayed
(unthresholded) input values
x
t
,
i.e., given that