Travel Reference
In-Depth Information
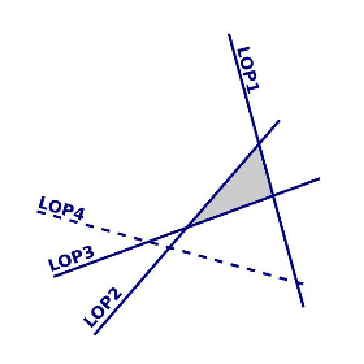
Figure 3: Plotting a fix
So let's accept that our sights will not be perfect. They will include an unknown random
error; some will be too high, others too low. For a single measurement it will be impos-
sible to tell which and by how much. However, if we had a series of altitude measure-
ments of the same body, we could obtain a better estimate of the true altitude value (and
therefore a high quality LOP) by applying simple statistical methods. So why waste those
precious minutes of twilight by taking individual sights of uncertain quality of many dif-
ferent bodies? Instead, let's focus on only two bodies but aim to make their LOPs as ac-
curate as possible by taking multiple sights of each body.
That leaves the question of how to best estimate the true altitude value from a series of
sights. Intuitively, we think of the average (arithmetic mean) as a way to cancel out errors
in a series of measurements. However, this is not the best method for sextant sights taken
on a small boat. For the average to be the best estimator of the true value, the errors in our
sextant altitude measurements must possess certain statistical properties: they must be
statistically independent, equally distributed, and conform to a certain type of statistical
distribution. Our sextant sights will fail to meet at least two - if not all three - of these re-
quirements. They will be neither independent nor identically distributed. In fact, we have
no idea what type of distribution our measurements will conform to.
In our case, a much better - and simpler - estimator of the true altitude value is the medi-
an (the middle value out of a sorted series of measurements). The median is a robust es-
Search WWH ::

Custom Search