Biology Reference
In-Depth Information
molecules, be them proteins, metabolites or any other
biomolecules. This defines a vast state space that the
network could explore. However, there are cases where
some parts of this vast state space are restricted owing to
the dynamics of the network. For instance, consider the
simple case of just two interacting metabolites, X and Y,in
which X produces Y, namely X
distribution plays an important role in determining the
controllability of a network. More specifically, scale-free
networks, which are highly non-regular, will feature a large
number of driver nodes and thus be difficult to control.
Interestingly, controllability is not governed by the hubs, as
the driver nodes tend to avoid the high-degree nodes.
The results presented above might seem to defy our
intuitive perception of biological networks as systems
which are expected to be firmly controlled. However, when
examined once again, they might offer some deeper insight
into the nature of control in biological systems. The fact
that there are many driver nodes, and that they are typically
the less central nodes in the network, is an expression of the
highly constrained nature of these networks. It shows that
the cellular networks are not free to explore the entire state
space, but are rather confined to a restricted area of this
space. Thus the only way in which these networks can be
driven into a predefined final state is by explicitly driving
almost each one of their nodes by an external signal
e
especially the low-degree nodes, whose state is otherwise
governed by the hubs. In a sense, one can interpret these
results as the strategy of cellular networks to circumvent
external control and maintain their function, even if a large
number of nodes are being influenced.
Y. The state of this
system is described by a point in the two-dimensional space
given by
!
¼ð
/
N
X
;
N
Y
Þ
, where N
X
ð
Y
Þ
is the concentration
of X
. However, by assigning a certain value to N
X
, the
result for N
Y
becomes predetermined via Y 's production by
X. The system is therefore confined to a small subspace of
the complete two-dimensional state space. If one wished to
steer the system to any desired state, the node X must be
explicitly driven by an external input. We say
[115
e
116]
that this system can be controlled (that is, manipulated into
any desired state) with a single driver node, X. In general, if
we wish to control a complex network, we first need to
identify the set of driver nodes that, if driven by different
signals, offer full control over the network. We are partic-
ularly interested in identifying the minimum number of
driver nodes, whose control is sufficient to fully control the
system's dynamics
[117]
. An illustration for simple three-
node networks is shown in
Figure 9.5
.
Applying the above concepts to transcriptional regula-
tory networks reveals that they are typically difficult to
control. This is expressed by their relatively large number
of driver nodes. As an example, for a typical transcriptional
regulatory network approximately 80% of the nodes are
driver nodes, indicating that in order to steer these
networks, the majority of the nodes have to be explicitly
controlled
[117]
. A higher extent of controllability is
observed for metabolic networks, where the fraction of
driver nodes is typically around one-third. From a topo-
logical point of view, dense and homogeneous networks are
relatively easy to control, whereas sparse and inhomoge-
neous ones are hard to control. This implies that the degree
ð
Y
Þ
Differential Networks
A given network topology may give rise to a variety of
dynamical behaviors under different dynamical rules or
environmental conditions. External stimuli may trigger the
activity of different parts of the network, further affecting its
dynamical functionality. However, a much broader range of
dynamical behaviors could be achieved under the rule of
a non-static topology, where the structure of the network
itself can react to environmental changes and external
stimuli. Recently, it has been found that cellular networks
indeed take advantage of this source of dynamical diversity,
(A)
(C)
(B)
N
z
Final state
X
X
Initial state
N
y
Y
Z
Y
Z
N
x
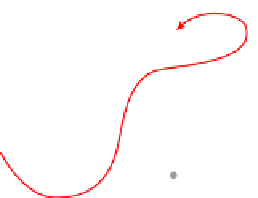
FIGURE 9.5
(A) The state of a three-node network is given by the concentration assigned to each of the nodes. This defines a point in the three-
dimensional state-space. Controlling the network means steering it from any initial state to any desired final state. (B) In this network two of the three
nodes must be explicitly controlled in order to manipulate the network. (C) Here it is sufficient to control just one node.