Environmental Engineering Reference
In-Depth Information
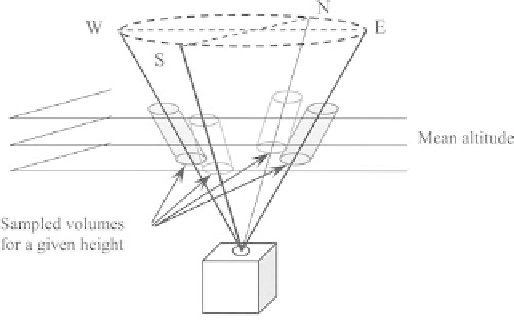
Figure 3: Working principle of a pulsed Lidar .
being an optical instrument, is also susceptible to infl uences from the presence
of dirt on the output window; hence there is a need for a robust cleaning device
of the Lidar window [9].
Two working principles of fi bre-base Lidars are in use: one uses a continu-
ous-wave system with height discrimination achieved by varying focus. The
laser light is emitted through a constantly rotating prism giving a defl ection of
30° from the vertical. This Lidar system scans a laser beam about a vertical
axis from the ground, intercepting the wind on a 360° circumference. By
adjusting the laser focus, winds may be sampled at a range of heights above
ground level.
The other system uses a pulsed signal with a fi xed focus. It has a 30° prism to
defl ect the beam from the vertical but here the prism does not rotate continuously.
Instead, the prism remains stationary whilst the Lidar sends a stream of pulses in
a given direction, recording the backscatter in a number of range gates (fi xed time
delays) triggered by the end of each pulse [10] (see Fig. 3).
Unlike pulsed systems, continuous-wave Lidar systems do not inherently 'know'
the height from which backscatter is being received. A sensibly uniform vertical
profi le of aerosol concentration has to be assumed in which case the backscattered
energy is from the focused volume. The obtained radial wind speed distribution in
this case is dominated by the signal from the set focus distance. The assumption of
vertical aerosol homogeneity unfortunately fails completely in the fairly common
case of low level clouds (under 1500 m). Here, the relatively huge backscatter
from the cloud base can be detected even though the cloud is far above the focus
distance. The resulting Doppler spectrum has two peaks - one corresponding to
the radial speed at the focused height and a second corresponding to the (usually)
higher speed of the cloud base. Unless corrected for, this will introduce a bias to
the wind speed measurement. For this reason, the continuous-wave Lidar has a
cloud-correction algorithm that identifi es the second peak and rejects it from the
Search WWH ::

Custom Search