Environmental Engineering Reference
In-Depth Information
u
1
u
2
u
3
u
4
u
5
q
{
Blade 1
{
0
Kinematic
coupling
terms
Blade 2
{
involving
the
q
degrees of
freedom
Blade 3
{
0
Drive
Train
Dynamic coupling terms
{
Tower
Dynamic coupling terms
{
Dynamic
equations
for
q
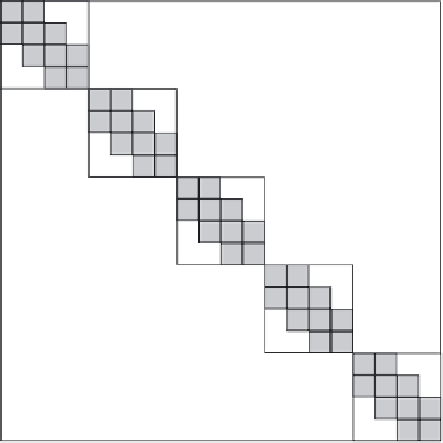
Figure 6: Structure of the mass, damping and stiffness matrices.
damping as described by eqn (9), the eigenvalues
w
i
are defi ned as solutions of
2
and for each one an eigenmode
e
i
is obtained by solving:
−
w
MK
+
=
0
2
Ke
=
w
Me
( 18 )
j
j
j
Eigenmodes are determined only within a multiple of themselves. Usually they
are normalized to unity. The nice thing about eigenmodes is that they form an
orthogonal basis for the space of possible responses in case the system is self
adjoint as in the case of a conservative mechanical system. Although their number
will be in the order of the system, in practice we only need to retain a small num-
ber corresponding to the lowest eigenvalues. Let
E
denote the matrix containing
the retained eigenmodes as columns. Then by setting
u
(
t
) =
Ea
(
t
) the dynamic
equations can be formulated with respect to
a
(
t
) and so the size of the system is
drastically reduced:
T
T
T
E MEa
+
E KEa
=
E Q
(19)
Note that
u
(
t
) =
Ea
(
t
) is equivalent to a projection of
u
on a reduced subset of the
eigenmode basis. The error thus introduced will be small provided that all modes
that can be resolve by the specifi c time step are included.





Search WWH ::

Custom Search