Environmental Engineering Reference
In-Depth Information
1200
20%
Failure sample frequency
Nominal distribution %
18%
16%
900
14%
12%
600
10%
8%
6%
300
4%
2%
0
0%
0.8
0.9
1
1.1
1.2
X
1
bin
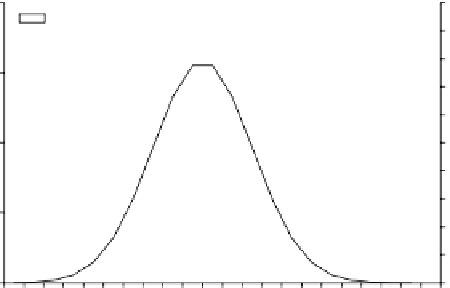
Figure 7.3
Histogram of the
X
1
failure samples from direct MCS.
samples, together with the nominal (unconditional) probability distribution of
X
1
(i.e., a
normal probability distribution with a mean and standard deviation of 1 and 0.05, respec-
tively). The
X
1
histogram from the 6213 failure samples deviates slightly from its nominal
(unconditional) probability distribution. This suggests that the effect of
X
1
on failure prob-
ability is rather minimal. Such results agree very well with the results from the hypothesis
The resolution of
P
(
F
) and
p
(
x
k
|F
) is pivotal to obtain
P
(
F
|
x
k
) and it depends on the num-
ber of failure samples generated in MCS (see
Equations 7.13
and
7.14
)
. As the number of
failure samples increases, the resolution improves. Note that the value of
P
(
F
) is constant,
although unknown before MCS. Therefore, increasing the number
n
f
of failure samples
One possible way to improve the resolution is, therefore, to increase the total number of
samples in MCS at the expense of computational time. Alternatively, advanced MCS meth-
ods (e.g., Subset Simulation) can be employed to improve efficiency and resolution at small
failure probability levels. The next section integrates Subset Simulation and probabilistic
failure analysis for generating failure samples efficiently.
7.4.3 Integration of probabilistic failure analysis
with Subset Simulation
Consider a Subset Simulation that performs
m
+ 1 levels of simulations with a driving vari-
able
Y
. The first level of Subset Simulation is Direct MCS. Samples of the next level are then
generated conditional on the samples collected from the previous level. As mentioned above,
the conditional samples generated in Subset Simulation rely on
Y
. In probabilistic failure
analysis, the conditional samples of interest are failure samples. For most geotechnical engi-
neering problems (e.g., slope stability analysis), the failure samples have relatively small
FS
(e.g.,
FS
< 1). On the other hand, the convention of Subset Simulation is to define
Y
as a vari-
able that monotonically increases as the simulation level increases. Following the convention
of Subset Simulation,
Y
in probabilistic failure analysis is defined as
1
/
FS
. As
1
/
FS
increases,
FS
decreases and the simulation gradually approaches the failure domain. The intermediate
threshold values {
y
i
,
i
= 1, 2, …,
m
} of
Y
are adaptively determined to divide the sample space
L
of an uncertain parameter
X
k
into
m
+
1
individual sets {
L
i
,
i
= 0, 1, 2, …,
m
}. According



























































Search WWH ::

Custom Search