Environmental Engineering Reference
In-Depth Information
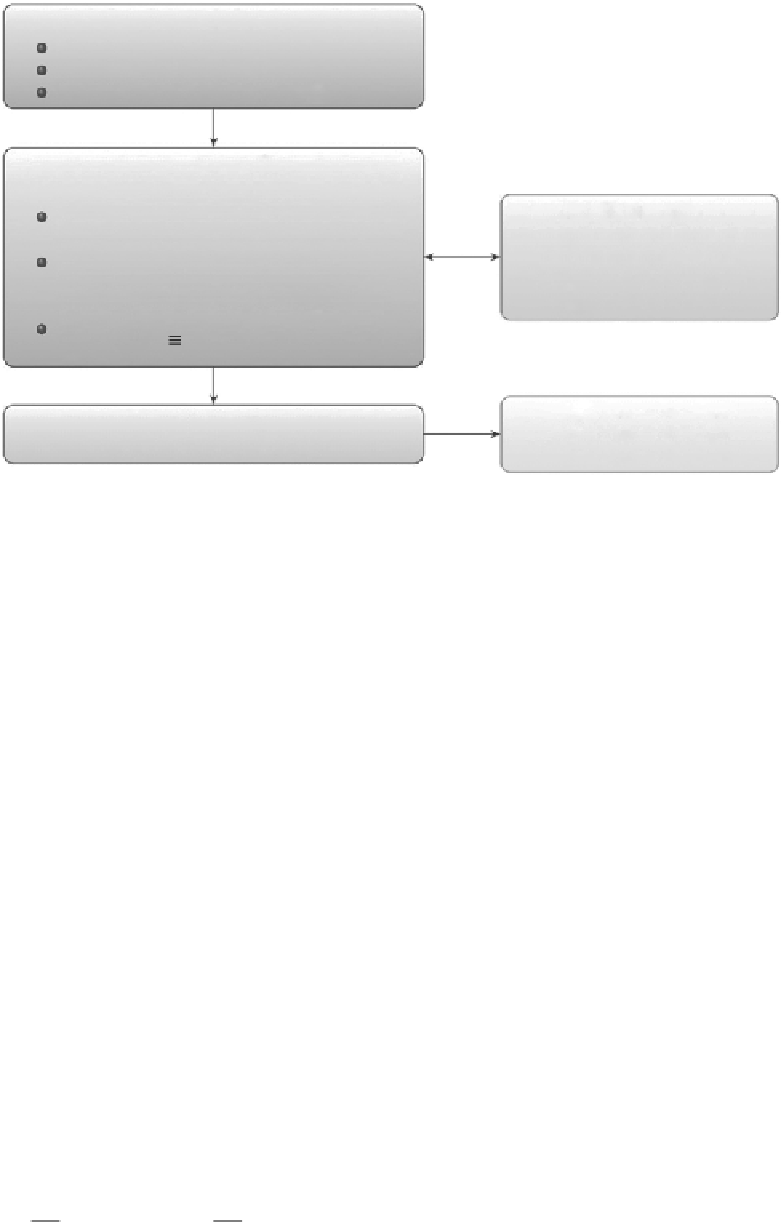
Initialization
Choose a norm
q
, 0 <
q
≤ 1
Select an intial design
Store the model evaluations in
Selection of an optimal PC basis
*
For
p =
1,....,
p
max
:
Apply LAR to the candidate basis
which
contains all those terms with q-norm ≤
p
Let
(
p
)
be the optimal basis obtained by
LAR and ε
LOO
the corresponding error
estimate (
corrected leave-one-out
estimate)
Enrich the design
if
ε
LOO
increases twice in a
row (overfitting). Restart
the procedure from degree
P
min
of basis
min
*
*
Store ε
LOO
,
min
min(ε
LOO
) and the
associated basis
min
*
*
Compute the coefficients
associated with
min
by least-square regression
*
STOP if
ε
LOO, min
is
less than a target error ε
tgt
Figure 6.5
Basis-and-ED adaptive algorithm for sparse PC expansions. (After Blatman, G. and B. Sudret.
2 011a .
J. Comput. Phys. 230,
2345-2367.)
6.4.1 Moment analysis
From the orthonormality of the PC basis shown in
Equation 6.11
, one can easily compute
the mean and standard deviation of a truncated series
ˆ
ˆ
A
Ψ
X
. Indeed, each
polynomial shall be orthogonal to Ψ
0
= 1, meaning that E [Ψ
α
(
X
)] = 0; ∀ α ≠
0
. Thus, the
mean value of
Y
is the first term of the series:
Y
=∑
∈
α
y
()
α
α
∑
α
Ψ
X
α∈A
ˆ
=
E
Y
E
y
ˆ
()
=
y
.
(6.49)
0
Similarly, due to
Equation 6.11
, the variance reads
∑
def
Var
ˆ
(
ˆ
=
=
σ
2
=
Y
E
Y
−
y
)
2
y
ˆ .
2
(6.50)
ˆ
0
α
Y
α∈A
α
≠
0
Higher-order moments such as the skewness and kurtosis coefficients δ
Ŷ
and κ
Ŷ
may also
be computed, which however, requires the expectation of products of three (resp. four) mul-
tivariate polynomials:
def
1
1
∑
∑
∑
(
ˆ
=
δ
=
E
Yy
−
)
3
E ΨΨΨ
α
(
XXX
)()()
y
ˆ
yy
ˆˆˆ.
ˆ
0
β
γ
α
βγ
Y
σ
3
σ
3
ˆ
ˆ
Y
Y
α
∈
A
β
∈
A
γ
∈
A
def
1
1
∑
∑
∑
∑
(
ˆ
=
() ()
ˆˆˆˆ
.
κ
=
E
Yy
−
)
4
E ΨΨ
α
(
XX
ΨΨΨ
)()
XX
yyyy
αβγδ
(6.51)
ˆ
0
γ
δ
Y
σ
4
σ
4
ˆ
ˆ
Y
Y
α∈
A
β∈
A
γ∈
A
δ∈
A










Search WWH ::

Custom Search