Environmental Engineering Reference
In-Depth Information
Table 5.1
Measured friction angles (°)
25.6 25.5 24 26 24.1 24 28.5 25.3 23.4 26.5
23.2 25 22 24 24.9 30 27 24.4 24.3 29.5
Source: Oberguggenberger, M. and W. Fellin. 2002. From probability to fuzzy sets: The struggle for meaning in geotechnical
risk assessment.
Probabilistics in Geotechnics: Technical and Economic Risk Estimation.
R. Pötter, H. Klapperich and H. F. Schweiger.
Essen, Germany, Verlag Glückauf GmbH: 29-38.
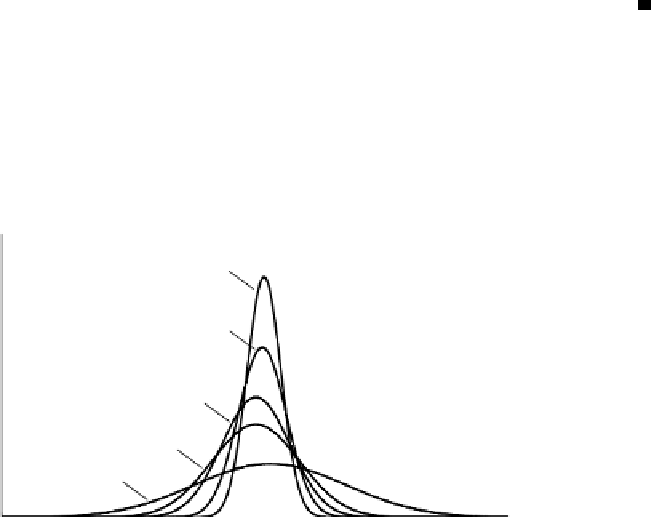
Figure 5.5
shows the likelihood functions describing the first 1, 3, 5, 10, and 20 samples from
this complete set. It can be clearly observed how the increased number of samples reduces
the width of the likelihood function. It is pointed out that in real situations, the number of
measurements is limited and it is unlikely that more than five samples are available.
illustration 5: Likelihood describing deformation measurements at the site
Consider deformation measurements made at locations
i
= 1, … ,
m
on a site. Let
y
i
denote
these measurements, which are associated with additive measurement errors ε
i
, all of which
have the same PDF
f
ε
. Furthermore, let
h
i
(
x
) be the results of a numerical model, predicting
deformation at the locations for given model parameters
x
. In this case, the likelihood func-
tion describing these deformation measurements is
m
∏
1
L
()
x
=
f
(
yh
−
(
x
)).
(5.26)
ε
i
i
i
=
This likelihood is applied in the application presented in Section 5.6.
illustration 6: Censored measurement
A measurement of a strength parameter
X
results in the outcome
“X
is larger than
x
m
”.
Such an outcome may occur, for example, when the material strength exceeds the capacity
0.7
n
: Number of samples
n
=20
0.6
0.5
n
=10
0.4
0.3
n
=5
0.2
n
=3
0.1
n
=1
0
15
20
25
30
35
μ
μ
(°)
Figure 5.5
Likelihood function of the mean friction angle, for different number of samples. The likelihood
functions are scaled by [
∞
L
(
µ
ϕϕ
1
)
]
−
.
∫
−
∞


















Search WWH ::

Custom Search