Environmental Engineering Reference
In-Depth Information
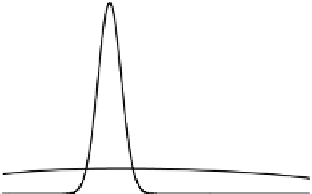
Likelihood
L
(
x
)
Prior
f
X
′
(
x
)
x
Figure 5.4
Illustration of a weakly informative prior.
vague, information on the parameters, in particular, for parameters with physical meaning.
Second, one can typically choose a prior distribution that has no or only very limited effect
on the posterior distribution and predictions, as illustrated in
Figure 5.4.
We use the more
loosely defined term
weakly informative prior
to describe such probability distributions.
Note that whether or not a probability distribution falls in this category is dependent on the
likelihood function, that is, on the measurements, in analogy to the non-informative prior.
If the measurements are very informative, the likelihood function will be highly peaked and
even a prior distribution with a moderate variance may have no effect on the posterior. In
practice, whether or not a prior is weakly informative can be found from a simple sensitivity
analysis: Does the posterior distribution change notably when the mean or standard devia-
tion of the prior distribution is changed?
It is possible to choose so-called
improper
prior distributions. These are probabil-
ity distributions that do not integrate to 1. The uniform distribution from 0 to ∞ is an
example of such a probability distribution. It is
′
fx
X
()
=
by
,
≥
0
If the constant
b
is zero,
∞
0
∞
0
fxx
the integral ∫
X
() d However, such a prior
distribution is admissible in Bayesian analysis, as long as the resulting posterior distribu-
tion is proper. This is due to the normalization constant
a
in
Equation 5.3
:
As long as the
integral
a
fxx
X
( d
′
results in zero; if
b
> 0 it is ∫
′
=∞
∞
0
=∫
() ( d
xf xx
X
′
results in a positive finite number, the posterior distribution
will be proper.
illustration 3: weakly informative prior
We repeat the analysis of Illustrations 1 and 2 with a weakly informative prior. We now use a
normal distribution with mean ′ =°
σ
µ
100
as a prior distri-
bution. Such a distribution obviously defies the physical boundaries at 0° and 90°, but this is
not critical as long as we ensure that the prior PDF has no influence on the final result. When
repeating the Bayesian updating of Illustration 1, the posterior PDF is obtained as a normal
distribution with mean
′′ =
′ =°
µ
µ
30 and standard deviation
µ
µ
25 035
.
°
σ
µ
1 73. . You can easily ver-
ify that the prior has no influence on the posterior in this case. In the extreme, one can select a
normal distribution with standard deviation
′ σ
µ
as a prior. (The prior mean is irrelevant
in this case.) This results in a normal posterior PDF with mean
′′ =
and standard deviation
′′ =
°
µ
µ
25 033
.
°
and standard
σ
µ
1 73. .
This clearly demonstrates that the weakly informative prior has no
influence on the final result in this case, and the posterior is determined by the likelihood.
′′ =
°
deviation
We also recompute the posterior reliability following Illustration 2. The posterior reliability
index calculated with the assumption of the weakly informative prior is β′ = 2.12 and the
corresponding probability of failure is Pr(
F
|
Z
) = 1.7 × 10
−2
. This probability is significantly


Search WWH ::

Custom Search