Information Technology Reference
In-Depth Information
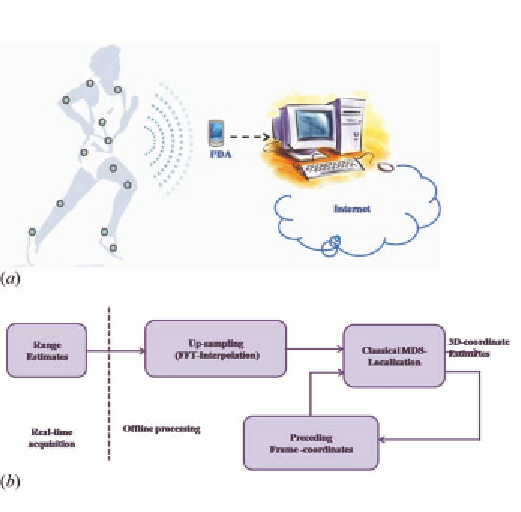
Figure 3. (a) Schematic representation of the proposed system. and (b) Block diagram of the ranging
and localization procedures of the proposed system (Shaban 2010).
We assume using standardized marker-sets. In
order to guarantee LOS links during movement,
we predetermine the groups of nodes that have
this property, as depicted in Figure 4 assuming
the Vicon marker-set. Typically, four nodes are
required in order to be able to determine the three
dimensional positions. So, we propose the use
the three nodes that are typically available per
segment in addition to a node from a neighboring
body segment, such that the node on that segment
has a LOS link with the node of interest during
movement, as depicted in Figure 3 assuming the
Vicon marker-set. More explicitly, the nodes at-
tached the leg-calf have LOS connections with
the corresponding nodes on the thigh segment of
the same leg.
as follows. We assume averaging multiple range
measurements in order to obtain a high ranging
accuracy, and consequently a high positioning ac-
curacy. Furthermore, during system initialization
we assume that the subject does not move, so that
the initial coordinates of all nodes are accurately
determined. After initialization, the subject is
allowed to move, where on-body range measure-
ments start to take-place. In order to accurately
determine the coordinates of the initial-frame, we
further assume the presence of eight reference-
nodes grouped into two node groups with four
nodes (rectangles) in each group with fixed and
predetermined dimensions. We assume that each
of the two groups of nodes is fixed on a pad with
fixed dimensions, and the test subject stands on the
mid-point between the two groups. This approach
guarantees an accurate system setup, as well as
direct LOS links between on-body nodes and each
of the reference-nodes. In Particular, each of the
two four-node groups is responsible for one side of
the body, and each of the on-body nodes transmits
Initial Localization Stage
As was mentioned in the previous sub-section,
we use LS localization for our initial localization
stage. The proposed measurement procedure is
Search WWH ::

Custom Search