Global Positioning System Reference
In-Depth Information
2600
2400
2200
2000
1800
1600
1400
0
20
40
60
80
100
120
140
160
180
200
Time (sec)
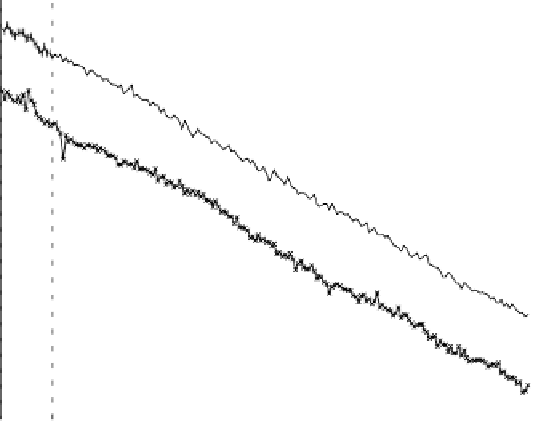
(a) From GPS altitude calculation. (b) From direction and reflected signals.
FIGURE 11.27
Altitude measured versus time.
Katzberg, Garrison, and Howell
(
11
)
were able to measure the reflected signal
at about 8 Km over water by this approach. The lower limit of the altitude
appears to be about 30 ft in this approach, because the fine time resolution method
(Section 8.11) is used to calculate the peak. The lower altitude limit is not limited
here by the sampling point, which is separated by 200 ns (approximate 200 ft).
A typical altitude result is shown in Figure 12.27. The upper curve is obtained
from the altitude calculation of the software GPS receiver; therefore the height is
referenced to sea level. The lower curve is obtained from the direct and reflected
signals, and the height is referenced to the surface of the ground. These two
curves match fairly well and show that the airplane is descending.
As mentioned earlier in this section, the altitude of the airplane is obtained
from the averaged altitudes calculated from different satellites. In the averaging
processing, a weighting is used on different altitude values. The weighting factor
does not depend on the angle
θ
in Figure 12.25b but is a function of reflection
signal strength. A stronger reflection signal has a large weighting factor because
a better peak location can be determined.
12.12 SATELLITE POSITIONS AND DOPPLER FREQUENCIES FROM
ALMANAC DATA
(
12
)
This section shows the procedure to calculate the satellite positions from the
almanac data. The information obtained from the almanac data can be considered










































































































































































































































































































Search WWH ::

Custom Search