Global Positioning System Reference
In-Depth Information
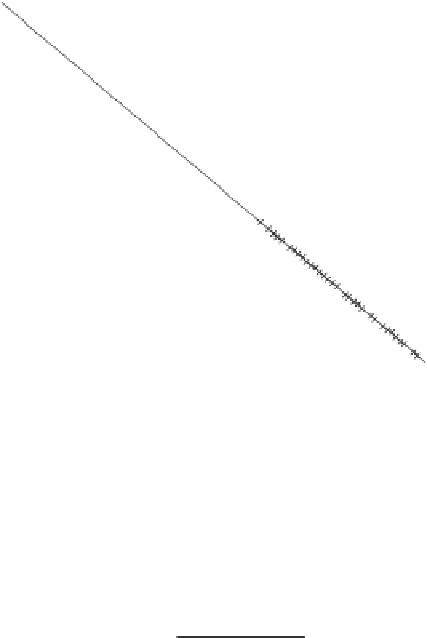
1800
1700
1600
1500
1400
1300
1200
1100
1000
0
20
40
60
80
100
120
Time in 10 ms
FIGURE 12.16
A line is extrapolated from “good” data.
only 100 raw data points obtained from the measurement, any values on the line
can be used to find the total initial C/A code phase change. From
x
(1) to
x
(101)
the span is 2 seconds of time. The number of points shifted per second can be
calculated as
y(
1
)
−
y(
101
)
2
p
=
(
12
.
2
)
Once the value of
p
is found, the sampling frequency can be found from
Equation (12.1).
Data obtained every 2 seconds are used to calculate the sampling frequency.
The sampling frequency is calculated 54 times, which means the length of the
data is 110 seconds. The same approach is used to determine the sampling
frequencies of two Motorola front ends. The average sampling frequencies mea-
sured are 5,455,656.85 and 5,455,640.80 Hz with standard deviations of 0.22 and
0.26 Hz, respectively. A frequency counter is used to measure the front end with
5,455,640.80 Hz sampling frequency, and the reading is between 5,455,641 and
5,455,640 Hz, because the counter has a resolution of 1 Hz. A very stable signal
generator is used to generate a signal at 5,455,640.80 Hz. The signal is measured
by the frequency counter, which also displays 5,455,641 and 5,455,640 Hz. Our
experiment indicates that the measurements are fairly accurate, and almost as
close as those from the frequency counter.
Because the measured sampling frequency is about 5455.6 or 5456.7 kHz,
which is off by more than 300 Hz from the designated sampling frequency, in
one ms there will be 5455.6 data points. The tracking program discussed in
Section 11.13 must be used to track the digitized output.








































































Search WWH ::

Custom Search