Global Positioning System Reference
In-Depth Information
equally well at every ms because they are realigned at every ms. The early and
late codes are off by one sample from the input data. Under this condition, the
average fine time obtained from one second of data and the fine time of every ms
are the same. Once the average fine time is found, no further operation is required
to find the fine time of every ms. In addition the value of
y
psa
is always at the
maximum, which can help to achieve a slightly better sensitivity in determining
the navigation data.
11.11 ACTUAL TIME SHIFTING IN TRACKING
The example given in the previous section is used to help explain the calculation
of the fine time of the first C/A code initial phase through one second of data. In
the actual tracking, however, the operation is slightly different. At the beginning
of the tracking the fine time of the first ms is not known. It can be any value
x
0
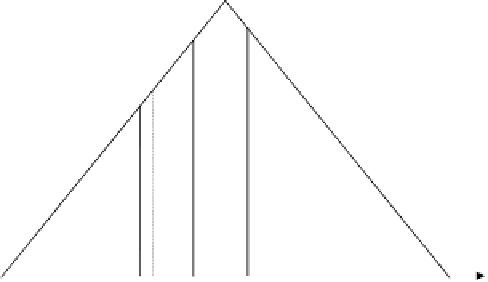
. The result of the very first second in tracking is illustrated in Figure 11.12.
This is basically the same as Figure 11.10, and the only difference is that the
y
p
is off from the true peak by an amount
x
0
. At the end of the first second, the
average fine time will be
x
0
+
30
.
153 ns if the Doppler frequency is 5 kHz. In
order to find the fine time of the first ms, the 30.153 ns must be subtracted from
the measured average fine time. Starting at the next second, the fine time can be
properly adjusted.
The adjustment is based on the idea of keeping the prompt peak correlation
output
y
p
at maximum. Under this requirement the locally generated prompt C/A
code and the C/A in the first ms of the input signal must not be exactly matched.
From the assumed Doppler frequency of 5 kHz, the time difference after 19 ms
of data is 60.306 ns, which is the
x
value. If in the first ms, the two C/A codes,
Correlation peak
1023
y
p
y
l
y
e
x
0
+ x/2
1
−1
Time
FIGURE 11.12
Resulting from a first second tracking. The initial time off for
y
p
can be
any value.




Search WWH ::

Custom Search