Global Positioning System Reference
In-Depth Information
2.4 BASIC EQUATIONS FOR FINDING USER POSITION
In this section the basic equations for determining the user position will be pre-
sented. Assume that the distance measured is accurate and under this condition
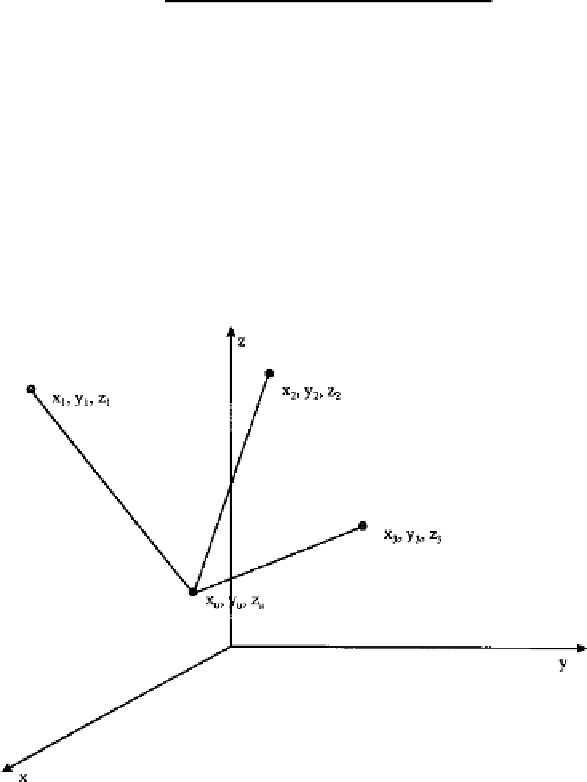
three satellites are sufficient. In Figure 2.3, there are three known points at loca-
tions
r
1
or (
x
1
,
y
1
,
z
1
),
r
2
or (
x
2
,
y
2
,
z
2
), and
r
3
or (
x
3
,
y
3
,
z
3
), and an unknown
point at
r
u
or (
x
u
,
y
u
,
z
u
). If the distances between the three known points to
the unknown point can be measured as
ρ
1
,
ρ
2
,and
ρ
3
, these distances can be
written as
ρ
1
=
(x
1
−
x
u
)
2
+
(y
1
−
y
u
)
2
+
(z
1
−
z
u
)
2
(x
2
−
ρ
2
=
x
u
)
2
+
(y
2
−
y
u
)
2
+
(z
2
−
z
u
)
2
(x
3
−
ρ
3
=
x
u
)
2
+
(y
3
−
y
u
)
2
+
(z
3
−
z
u
)
2
(2.1)
Because there are three unknowns and three equations, the values of
x
u
,
y
u
,
and
z
u
can be determined from these equations. Theoretically, there should be
two sets of solutions as they are second-order equations. These equations can be
solved relatively easily with linearization and an iterative approach. The solution
of these equations will be discussed later in Section 2.6.
In GPS operation, the positions of the satellites are given. This information
can be obtained from the data transmitted from the satellites and will be dis-
cussed in Chapter 5. The distances from the user (the unknown position) to the
FIGURE 2.3
Use three known positions to find one unknown position.


Search WWH ::

Custom Search