Global Positioning System Reference
In-Depth Information
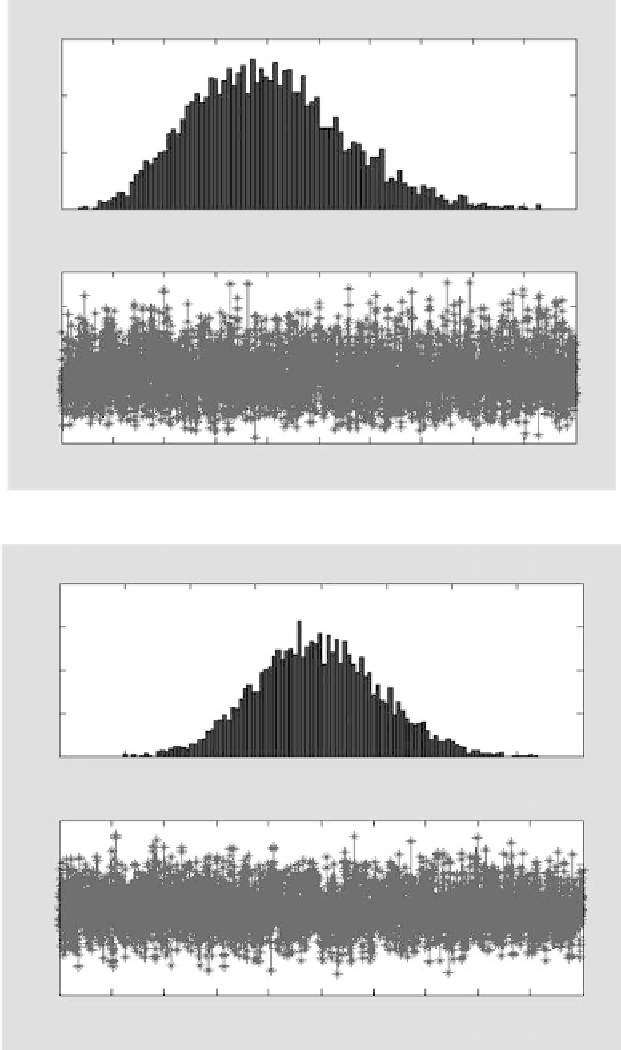
Incoherent integration 2 times
150
100
50
0
0
100
200
300
400
500
600
700
800
900
1000
(a) 2 summations histogram.
1000
800
600
400
200
0
0
500
1000
1500
2000
2500
3000
3500
4000 4500
5000
(b) 2 summations time domain.
Incoherent integration 20 times
200
150
100
50
0
2000
2500
3000
3500
4000
4500
5000
5500
6000
(c) 20 summations histogram.
6000
5000
4000
3000
2000
0
500
1000 1500
2000
2500
3000
3500
4000
4500
5000
(d) 20 summations time domain.
FIGURE 10.15
Noise distribution after noncoherent integration.
Search WWH ::

Custom Search