Global Positioning System Reference
In-Depth Information
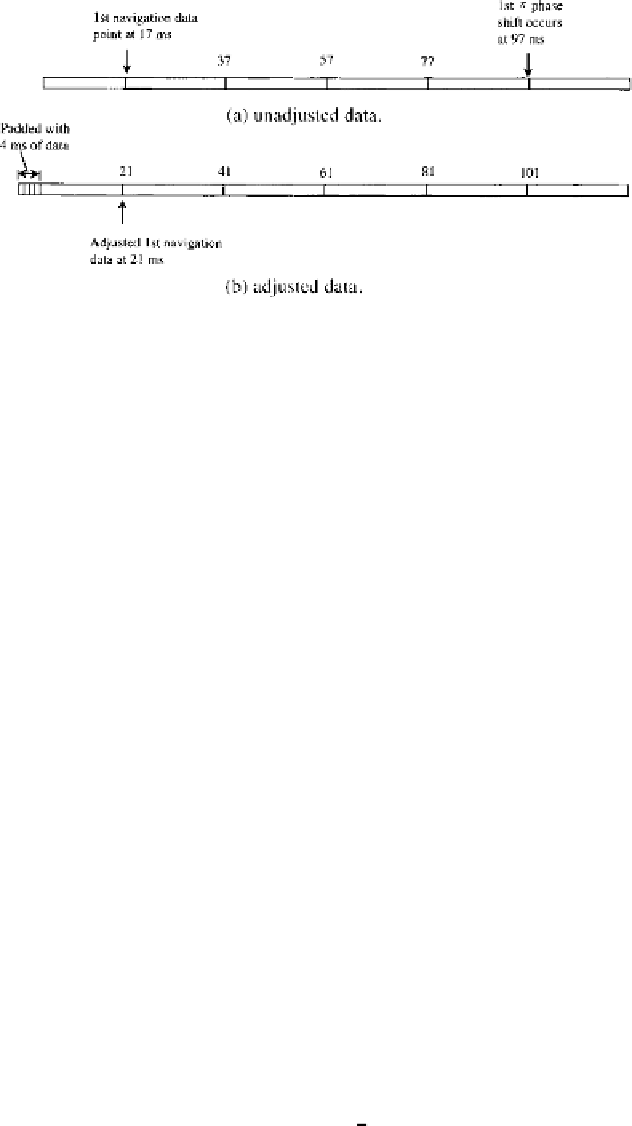
FIGURE 9.4
Adjustment of the first navigation data point.
navigation data bit. The signs of these navigation data are arbitrarily chosen. The
navigation data are designated as
+
1and
−
1. The parity check process can put
the navigation data in the correct polarity.
9.4 SUBFRAME MATCHING AND PARITY CHECK
After the outputs from the tracking are converted into navigation data, the next
step is to find the subframes in these data. As discussed in Section 5.9 and
Figure 5.7, a subframe will start with the preamble of pattern (10001011) in the
first word (the telemetry). In the second word HOW (the hand over word), bits
20 - 22 are the subframe ID and last two bits (29,30) are the parity code (00).
However, simply searching for these data does not guarantee that the beginning
of a subframe will be found. One can search for more than one subframe at a
time. If matches are found for more than one subframe, it has a better probability
of being correct.
It is important to notice that the polarities of the words in a subframe may
change. Therefore, one should perform correlation on only one word (30 nav-
igation data bits) at a time. In other words, each word should be separately
correlated. The code to match the preamble can be written as (1
1
1 1). Since the polarity of the word is not known, the matched result can be
±
8.
Once a match is found, 300 data points (1 subframe) later there should be another
preamble match. If a match is not found, the first match is not a preamble. One
can repeat this method to find the beginning of several subframes. More matches
can improve the confidence level. The last two bits in the HOW can also be used
for subframe matching. Once a subframe is found, the subframe number can be
found from bits 20 - 22 of the HOW. The subframe numbers must be from 1 to
5 and they must be properly ordered from 1, 2, 3, 4, 5, 1, and so forth.
The parity check has been discussed in detail in Section 5.11. The procedure
will not be repeated here. Two programs (
p9 1
)and(
p9 2
) are listed at the end
of this chapter. They are used to match subframes and check parity.
−
1
−
1
−
11
−

Search WWH ::

Custom Search