Global Positioning System Reference
In-Depth Information
9.2 INFORMATION OBTAINED FROM TRACKING RESULTS
As previously discussed, assume that the input GPS signal is down converted
to 21.25 MHz, filtered to about 2 MHz bandwidth, and digitized at 5 MHz. The
minimum requirement for the collected data is that they must contain the first
three subframes. The information in these three subframes is used to find the
satellite position and the user position as discussed in Chapter 5. The results
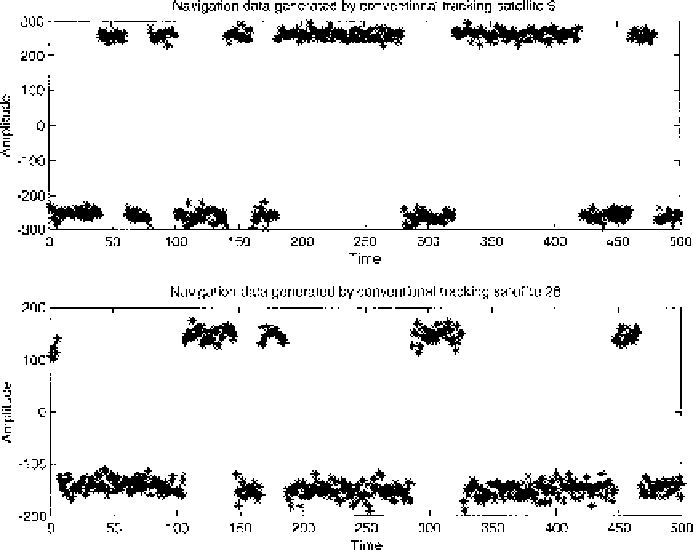
from the conventional tracking program are shown in Figure 9.1, which plots
the amplitude of the output signal. Each data point is obtained from 1 millisec-
ond of digitized data. The signal from satellite 6 is relatively strong and the
signal from satellite 28 is relatively weak, which can be observed from the two
amplitude scales.
The same signal is tracked by the BASS method and the results are shown
in Figure 9.2. The vertical scale in Figure 9.2 shows the angle separation rather
than the signal amplitude. Since the difference in angle is always
π
for a phase
change, the scales stay the same for both plots. In this figure, the stronger signal
shows a tighter groups than the weak one.
In addition to the output signal, the conventional approach will output the
initial phase of the locally generated C/A code. This initial phase of the C/A
represents the fine time resolution in the tracking loop. In the BASS method, the
FIGURE 9.1
Tracking results from conventional phase-locked loop.
Search WWH ::

Custom Search