Global Positioning System Reference
In-Depth Information
must be changed into a discrete system. This discussion is based on reference 5.
The transfer from the continuous
s
-domain into the discrete
z
-domain is through
bilinear transform as
z
−
1
2
t
s
1
−
s
=
(
8
.
32
)
1
+
z
−
1
where
t
s
is the sampling interval. Substituting this relation in Equation (8.22) the
filter is transformed to
C
1
z
−
1
C
2
(C
1
+
C
2
)
−
F(z)
=
C
1
+
=
(
8
.
33
)
1
−
z
−
1
1
−
z
−
1
where
2
τ
2
−
t
s
C
1
=
2
τ
1
t
s
τ
1
C
2
=
(8.34)
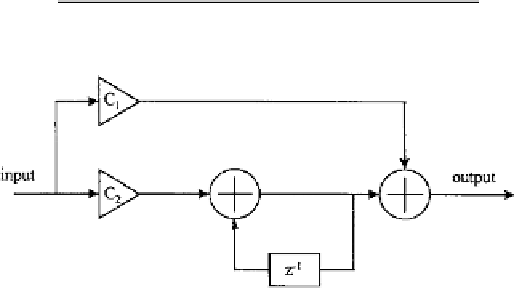
This filter is shown in Figure 8.2.
The VCO in the phase-locked loop is replaced by a direct digital frequency
synthesizer and its transfer function
N
(
z
) can be used to replace the result in
Equation (8.7) with
k
1
z
−
1
1
θ
f
(z)
V
o
(z)
≡
N(z)
=
(
8
.
35
)
−
z
−
1
Using the same approach as Equation (8.8), the transfer function
H
(
z
) can be
written as
θ
f
(z)
θ
i
(z)
=
k
0
F (z)N(z)
H(z)
=
(
8
.
36
)
1
+
k
0
F (z)N(z)
Substituting the results of Equations (8.33) and (8.35) into the above equation,
the result is
k
0
k
1
(C
1
+
C
2
)z
−
1
−
k
0
k
1
C
1
z
−
2
H(z)
=
(
8
.
37
)
1
+
[
k
0
k
1
(C
1
+
C
2
)
−
2]
z
−
1
+
(
1
−
k
0
k
1
C
1
)z
−
2
FIGURE 8.2
Loop filter.










Search WWH ::

Custom Search