Global Positioning System Reference
In-Depth Information
is unknown. However, since the frequency is within 1250
10 kHz, it is possi-
ble to select a delay time to fulfill the requirement. For example, one can chose
2
±
10
−
6
s
400 ns. Since the input
data are digitized at 5 MHz, the sampling time is 200 ns (1/5 MHz). If the input
signal is delayed by two samples, the delay time
τ
×
π
×
1
,
250
×
10
3
τ
=
π
, thus,
τ
=
0
.
4
×
=
=
400 ns. Under this condition
|
|=|
|=
cos
(
2
πf τ )
cos
(π)
1. If the frequency is off by 10 kHz, the correspond-
|
|=|
×
×
10
3
×
×
10
−
6
)
|=
ing value of
0
.
9997,
which is close to unity. Therefore, this approach can be applied to real data.
The only restriction is that the delay time cannot be arbitrarily chosen as in
Equation (7.15). Other delay times can also be used. For example, delay times of
a multiple of 0.4 us can be used, if the delay line is not too long. For example,
if
τ
cos
(
2
πf τ )
cos
(
2
π
1
,
260
0
.
4
=
1
.
6 us, when the frequency is off by
±
10 kHz, the
|
cos
(
2
πf τ )
|=
0
.
995.
One can see that
|
cos
(
2
πf τ )
|
decreases faster if a long delay time is used for
a frequency off the center value of 1,250 kHz. If the delay time is too long the
|
cos
(
2
πf τ )
|
may no longer be close to unity.
The problem with this approach is that when two signals with noise are multi-
plied together the noise floor increases. Because of this problem one cannot search
for 1 ms of data to acquire a satellite. Longer data are needed for acquiring a
certain satellite.
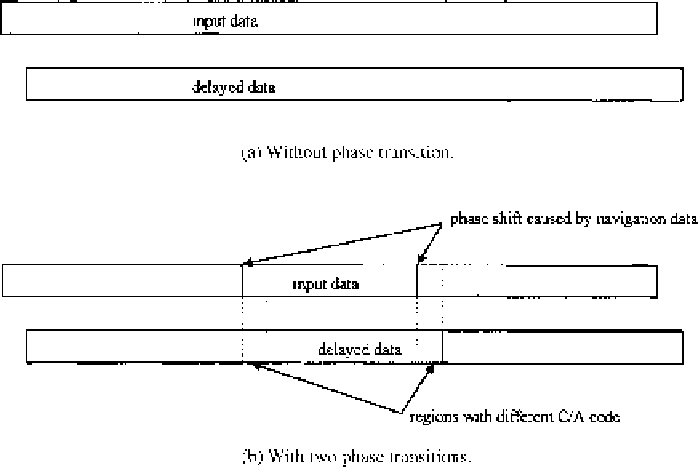
One interesting point is that a navigation data change does not have a signif-
icant effect on the correlation result. Figure 7.6 shows this result. In Figure 7.6a
there is no phase shift due to navigation data. The “new code” created by the
multiplication of the C/A code and its delayed version will be repetitive every
FIGURE 7.6
Effect of phase transition on the delay and multiplication method.
Search WWH ::

Custom Search