Information Technology Reference
In-Depth Information
The PB model is a particular case of TS systems, as it is derived from a set of
fuzzy if-then rules with singleton consequents such that
IF
x
is
W
˃˄
,
THEN
x
is
f
˙
(˃, ˄ )
2
is a state vector,
W
˃˄
=
(w
1
(
x
1
), w
2
(
T
which in a two-dimensional case,
x
∈ R
x
2
))
T
is a membership function vector,
f
(˃, ˄ )
=
(
f
1
(˃, ˄ ),
f
2
(˃, ˄ ))
∈
R
is a singleton
consequent vector, and
˃, ˄
∈
Z
are integers (1
˃
n
1
,
1
˄
n
2
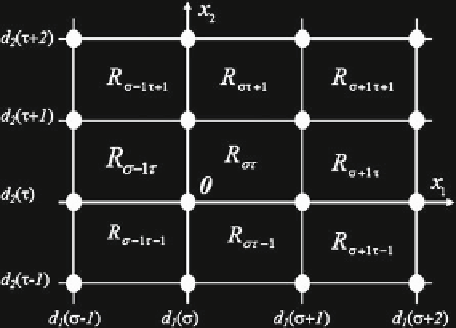
) defined by,
˃(
x
1
)
=
d
1
(
max
(
i
))
where
d
1
(
i
)
x
1
,
˄ (
x
2
)
=
d
2
(
max
(
j
))
where
d
2
(
j
)
x
2
.
R
˃˄
, the PB models that approximates a general nonlinear function is
expressed as,
For
x
∈
⊧
⊨
˃
+
i
=
˃
1
˄
+
j
=
˄
w
1
j
2
(
i
f
1
(
x
1
,
x
2
)
=
1
(
x
1
)w
x
2
)
f
1
(
i
,
j
),
˃
+
i
=
˃
1
˄
+
j
=
˄
w
1
j
2
(
i
f
2
(
x
1
,
x
2
)
=
1
(
x
1
)w
x
2
)
f
2
(
i
,
j
),
⊩
˃
+
i
=
˃
1
˄
+
j
=
˄
w
1
j
2
(
i
1
(
g(
x
1
,
x
2
)
=
x
1
)w
x
2
)g(
i
,
j
),
˃
+
i
=
˃
1
˄
+
j
=
˄
w
1
j
2
(
i
h
(
x
1
,
x
2
)
=
1
(
x
1
)w
x
2
)
h
(
i
,
j
),
where
⊧
⊨
w
1
(
x
1
)
=
1
−
ʱ,
w
˃
+
1
1
(
x
1
)
=
ʱ,
w
2
(
⊩
x
2
)
=
1
−
ʲ,
w
˄
+
1
2
(
x
2
)
=
ʲ,
Search WWH ::

Custom Search